
人形機器人上臺階這麼穩,是因為有個“肚臍眼”嗎?
人形機器人“天工”,是由工信部和北京市共同支援的具身智慧機器人創新中心設計研發的。
“天工”是純電驅擬人奔跑全尺寸人形機器人 ,它可以穩定行走、奔跑、翻越障礙等,我們看到的“天工”,不僅是一個人形機器人,還是人形機器人的母平臺。
研發人員介紹,機器人母平臺可以作為一個基礎平臺,擴展出更多的功能。比如更換安裝更為精巧的機械臂、更為智慧的頭部等。在機器人的胸腔內,還留存了足夠的空間,方便它擴展電池續航和運算能力。目前,“天工”正在進行持續的迭代和開發,並且擁有了多項技術突破。
近期“天工”又掌握了哪些新本領?
要實現諸多技藝有什麼難度?
人形機器人能幫我們幹哪些活?
“天工”最近有了哪些新本領?
此前,人形機器人“天工”已經可以穩定行走、奔跑、翻越障礙等,甚至還在學習如何惟妙惟肖模倣人體形態。經過不斷學習迭代,人形機器人“天工”最近又掌握了哪些新本領呢?
最近,“天工”人形機器人在戶外真實地形測試中,成功登上北京通州區海子墻公園最高點,實現了100多個臺階的連續攀爬,成為全球首例可在室外連續攀爬多級階梯的人形機器人。
借助具身“大腦”和具身“小腦”,“天工”機器人能夠在行進中精準識別前方地形,並實時調整全身動作和步態,在沙地、雪地、山坡等多種複雜地形中實現高速奔跑,奔跑速度已經由最初的每小時6公里提升至每小時12公里。
“天工”如何實現攀登百級臺階?
那麼,人形機器人要實現攀登百級臺階 ,具體都有哪些難度呢?“天工”又是怎麼實現的呢?攀登百級臺階,“天工”都有哪些好幫手?
無磕碰、不踩棱、不踏空,在北京的一個公園內,“天工”平穩攀登了134級臺階,這些臺階的高度不一,臺階縫隙甚至還存在破損和鬆動,對人來説都會有一定攀爬難度,“天工”是怎麼實現的呢?

人形機器人“天工”之所以能實現戶外場景攀爬100多級臺階的本領,主要依賴於它新增加的兩個裝備。
在它的頭部有一個鐳射雷達↓

而在它的腹部也就是人類肚臍眼的位置,增加了一個攝像頭↓

這樣的兩個裝備組合在一起,就為“天工”打開了一個新的視覺的眼睛,通過對周圍環境視覺信號的實時捕捉,可以讓“天工”在複雜的環境過程中自主進行識別和行動。
“天工”順利實現了依靠視覺融合感知進行上下臺階。視覺的融入,相當於給機器人又增加一層複雜的數據輸入,他們要在極短時間內,完成計算和運動控制,決策和行動時往往“失之毫釐,謬以千里。”
團隊介紹,我們看到的人形機器人大多是不具備視覺感知能力的“盲人”。這些沒有視覺感知能力的機器人要依靠提前建模,邁出固定步幅去上臺階,或者依賴倣真訓練的經驗,嘗試碰觸障礙物的位置,再去判斷如何邁步,在一些陌生場景下,踏空摔倒就很常見了。
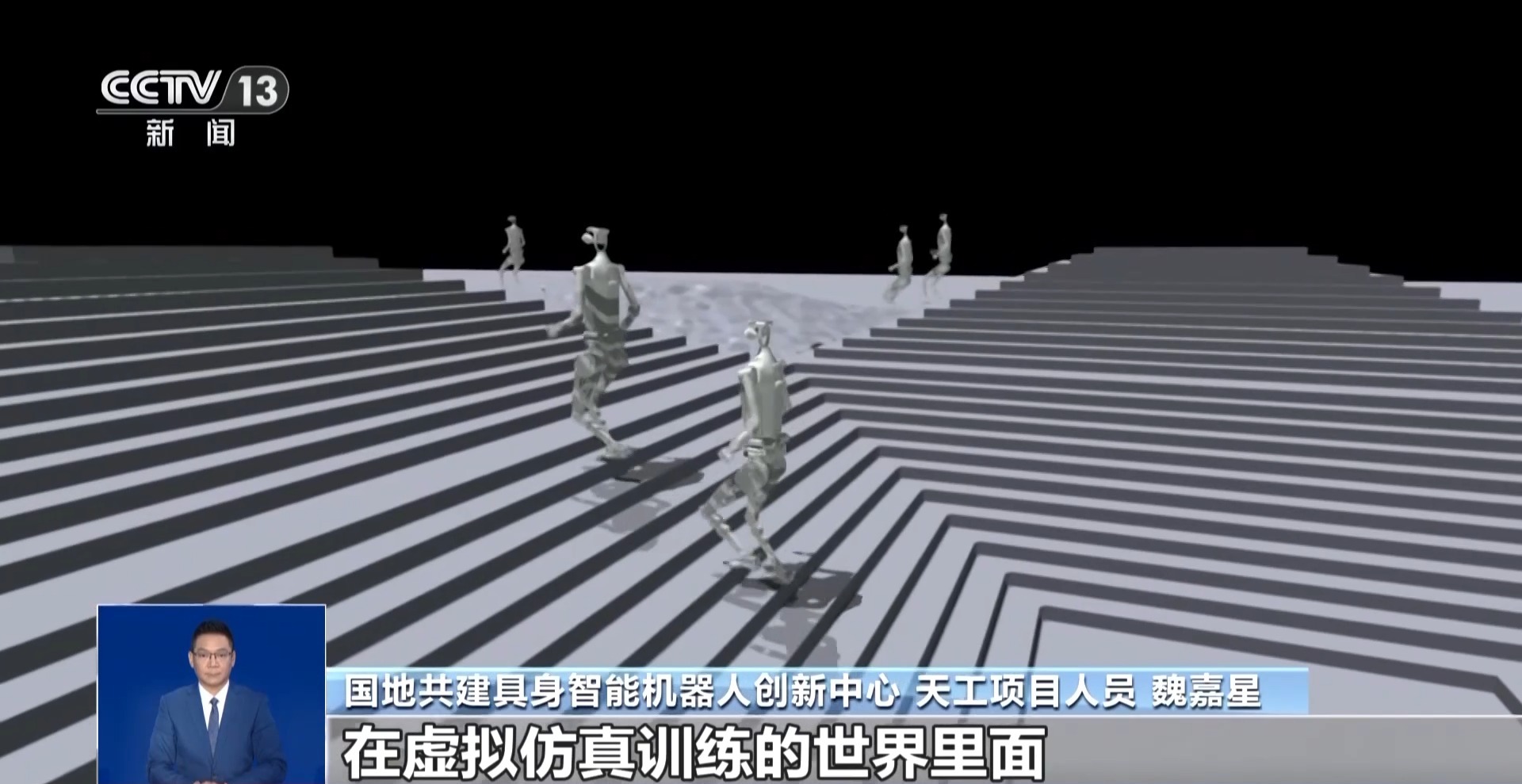
國地共建具身智慧機器人創新中心天工項目人員 魏嘉星:對於人形機器人來説,要做到穩定的感知行走,其實對於它的整個計算能力是有非常高的要求的,要保持50毫秒以內的高頻率視覺更新。同時我們會把視覺感知的一些資訊和本體資訊,在虛擬倣真訓練的世界裏進行部署。部署好了之後,會有成百上千台機器人結合這種演算法進行優化和迭代。我們把效果訓練好之後,再部署到真實物理世界的機器人身上,就可以讓它具備一個很好的感知行走能力了。
"天工"是依靠"眼睛"來看路嗎?
人形機器人“天工”其中一隻眼睛在肚臍的位置,這是為什麼呢?另外,“天工”的運動過程中,是單純依靠這些眼睛來看路的嗎?
之所以把攝像頭放在了機器人的“肚臍眼兒”上,是為了能夠讓攝像頭更好看清腳向前行進的道路。
但即便如此,它所能獲取的環境資訊還是十分有限。

國地共建具身智慧機器人創新中心 天工項目人員 魏嘉星:我們的資訊可能還是不夠的,因為人形機器人在行走的過程中,還會擺動它的身體、手部或者腿部,也會對資訊有一定的遮擋。我們通過對於運動演算法的突破,能夠讓機器人從有限的資訊,推測出更多全面的資訊,從而實現它穩定的感知行走。
“天工”如何實現雪地奔跑?
除了普通路況,您知道“天工”是如何應對特殊天氣和路況的嗎?比如如何實現雪地奔跑?應對複雜地形的移動能力提升,將成為人形機器人走出實驗室,在真實環境執行任務,甚至在山地、雪地救援、廢墟等極端環境下作業的基礎。
目前“天工”的最大奔跑時速已提高至12千米。在雪地進行高速奔跑,環境鬆軟濕滑,對於機器人來説並不容易。
研究人員表示,他們會在虛擬倣真場景下,給機器人注入一段短時記憶,讓機器人能夠知道,在特殊環境和情況下,如何更好進行本體的自我控制。
人形機器人如何變身電力巡檢員?
隨著技術不斷突破,人形機器人愈加成為人類的好幫手。一起來看看“天工”是如何變身電力巡檢員的。
只見“天工”走進配電室,手持超聲波低電波局部放電檢測儀,對多臺電櫃進行多點位局部放電檢測,高效完成巡檢任務。同時還能順利完成合閘、分閘等操作任務。
發揮如此穩定的“天工”,在日常訓練中,也要面對很多不穩定的場景,增加它的抗干擾性。比如重達10公斤的大球,直接砸在“天工”身上,它簡單調整步伐,很快就站穩了腳步。之所以做這種擊打訓練,目的就是讓機器人在面對任何一種突如其來的衝擊,如大風天氣等,依然能夠穩穩執行任務。

